
【--------梦幻西游手游辅助说明--------】
鸟人助手APP有安卓免Root版、iOS越狱版和iOS免越狱双版本,还支持安卓模拟器辅助挂机运行,实现安卓、iOS、电脑三端挂机,上线梦幻西游手游脚本,不封号防封号,很稳,提供梦幻西游手游安卓免ROOT、iOS免越狱和iOS越狱搬手游辅助工具,还支持梦幻西游手游后台挂机,小窗口挂机,息屏挂机模式,虚拟安卓系统、梦幻西游手游手游多开、双开、手机分身,含游戏自动任务,自动日常等脚本。梦幻西游手游手游辅助挂机支持安卓和iOS的大部分机型,还支持安卓模拟器。
【--------梦幻西游手游游戏介绍--------】
《梦幻西游》手游是一款基于中国名著《西游记》世界观,以“仙人魔”三族人物为基础,结合十三个不同特色的门派玩法而创立的游戏,是由网易游戏开发,全球超过一亿玩家都在玩的国民级回合制手游。
游戏的背景建立在贞观年间,在这里你可以体验全新人生;
可以拜入大唐名将程咬金门下,成为仗剑走天涯的无敌剑客;
也可以拜入东海龙王门下,成为能呼风唤雨的法术大能;
如果你喜欢悬壶济世,拜入观音娘娘的普陀山会是个不错选择;
如果你喜欢掌控战场,推荐你成为菩提老祖门下方寸山弟子;
在这个西游世界里,你可以使用不同的召唤灵,通过炼妖手段练就稀世神宠;也可以通过各种资源的组合,打造出绝世神兵;

【--------梦幻西游手游辅助教程--------】
第一步:点击页面中下载地址,选择玩家需要的版本下载,下载好“鸟人助手”APP之后安装。
第二步:使用梦幻西游手游辅助时,先打开安装好的鸟人助手软件,注册账号或登陆,不然将无法使用梦幻西游手游手游辅助。
第三步:查找梦幻西游手游游戏或者点击搜索按钮搜索:梦幻西游手游,在搜索结果中选择对应的梦幻西游手游手游进去梦幻西游手游辅助专区。
第四步:梦幻西游手游脚本专区有多个可供选择的脚本功能,玩家可选择您需要的梦幻西游手游脚本,选择好之后,点击该脚本“运行”。
第五步:点击“运行”后,在弹出的梦幻西游手游辅助界面上,根据玩家的需求,勾选您要执行的梦幻西游手游挂机脚本。
第六步:设定好梦幻西游手游辅助后,在游戏界面中,点击悬浮的鸟人助手图标并运行脚本,就开始自动挂机运行了。
【--------梦幻西游手游后台挂机教程--------】
鸟人助手后台挂机:可通过后台挂机实现梦幻西游手游游戏、微信双开、多开,一台手机变两台,养小号神器,工作室可节约成本;息屏挂机,可将游戏置于后台挂机运行辅助后熄灭屏幕,不用一直亮着手机屏幕,降低电池损耗;后台挂机、窗口挂机,将游戏置于后台并使用梦幻西游手游辅助挂机,不占用手机,使用梦幻西游手游辅助运行游戏时还可以刷QQ、微信、微博,看视频等,并且随时可以切出窗口观察辅助运行状态。
第一步:下载鸟人助手软件后打开,点击后台挂机标签页使用后台挂机功能。
第二步:首次使用需要下载相关插件,大概需要3-5分钟。
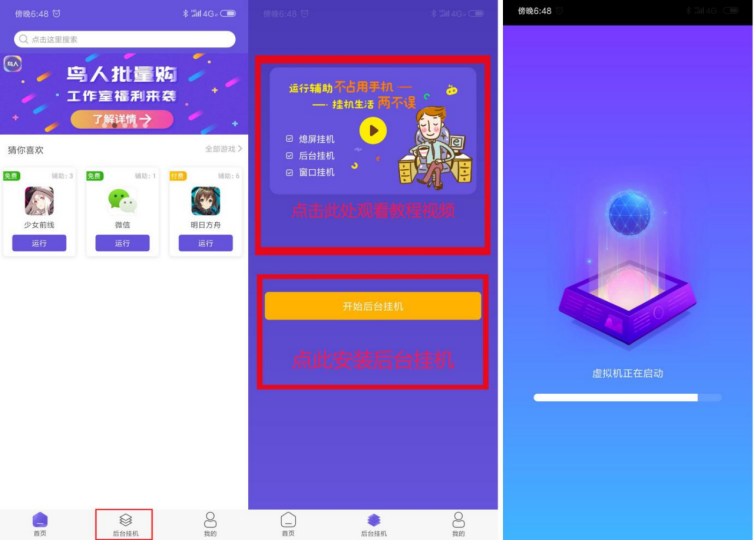
第三步:进入梦幻西游手游后台挂机页面,点击梦幻西游手游游戏图标或应用导入选择开启辅助游戏。
第四步:点击悬浮窗上【辅助列表】可选择和打开梦幻西游手游脚本,设置梦幻西游手游脚本功能后启动脚本开始挂机。

第五步:启动梦幻西游手游辅助脚本成功,自动将梦幻西游手游游戏置于后台。
第六步:梦幻西游手游后台挂机开启期间可以将画面最小化或窗口化,期间不会影响梦幻西游手游正常挂机和手机正常操作。
